26 flights in Autonomy, few afterthoughts from WC F3J by Sydney Lennsen, latest development on the F5J/FXJ battlefield. Is it really better to have smooth and accurate wings, and how about walkalong e-glider?
Autonomy
26off flights achieved by Massimo (Max) Verardi in Torino. There is an interesting discussion on the Italian forum (google translation to English) on this topic:
- Max did fly his Pike Perfect (2700 g), no floater I would expect there
- Max himself answered the question „how many flights is posible“ with following words: „3.5 hours is 12600 seconds, a flight could take in total 375 seconds (the flight time shall be longer than 6 minutes, say 5 seconds more is a good margin, then to pick up the model and toss it), accordingly – 33 flights“. Well, so far he has achieved „only“ 26 🙂
- Reportedly, Max will be forced to fly the Easy Star next time, although some ther pilots are against it – now they can blame their worse models for being beaten 😆
What does scare me most is that he does not feel at all limited by the energy available. The energy provided to each pilot is 666 W.min/kg which could correspond to about 2000 m of height. Our, Czech, rules allow only 600 W.min/kg and measured on the ground, ie. statically. Still, our best achievement is 14 flights only.
F3J
See the RC Soaring Digest. Perhaps also we, electroglider pilots, can learn something (BTW – nice pictures in that magazine):
- 12off qualification rounds was flown, however only 3 names had changed between 6th and 12th round in the top 15; thus, it is necessary to fly so many qualification rounds?
- all top pilots use short tows and know how to fly far and low; accordingly there is no sense in shortening the tow line (see Massimo’s explanation above); the contest is reduced to starts and landings.
Tomáš Bartovský, head of FAI F3 SC, is waiting for proposals on how to modify the rules in order to make them more „accesible“ to wider population. Well, I would propose two – limit a wingspan and measure the height (using the altimeter) :-), however I am sure that the „dandelioners“ (how F3J pilos are called over here by the F3B community) will sort it out themselves :-).
Altimeters FXJ
It is a nice reading on the RCGroups but I would not call it a discussion. The HL (high limiter) camp is very single minded. What I understood is that the commision agreed upon the proposal resembling F3J where only glide time counts, the altimeter shall check also the rate of climb and zooming.
My impressions are (a) a very well conducted lobbing of the RC-Electronics, even if the rules are changed in future all pilots will already have their devices, and (b) I am really interested in a stand that will be capable of checking all these functions and features. Please note, that the organiser shall be able to check the model/device parametres, it is required in the FAI code. From what I know about measuring I guess it will be neither simple nor low cost.
From all proposals for FXJ rules I like most these two (in the order put here):
- „Palo Lišhák’s Red-point“ variant: height is recorded and deducted from the flight time, with „Petr Dušek’s“ correction – the height is checked in two time points – at a moment of the motor switch off and and a moment of 5 seconds later.
- Height limiters and some restriction on power.
RCEX
I have added the rules for RCEX 2011 to the menu strip above. There are two big differences from the 2010 rules:
- In 2011 we will fly a full „multiple motor run“ concept, there will be no penalty for second and further motor climbs.
- Bad points will be summed, it should make for faster and easier score calculation. Of course, he/she, who has less of these „bad“ points, wins.
Autumn and winter RCEX.

In these seasons I usually fly with my e-hlg „Maynah“ and check the motor run time needed for making 30 minutes flight (low pass each 10 minutes). It is interesting, the shortest motor run time was 0:41, the longest one 2:50. The „dead air“ performance can be around 2:30 but of course it depends a lot on the ambient (and thus battery)temperature.
X5J
Last round of X5J will be held next weekend.
Wing surface finish
From time to time I do researches „for my living“. There is a lot of information publicly available on the NASA technical server.
The document of the Accession Nr. 79N23891 presents the aerodynamical tunnel measurement data for a glider wing section with three different surfaces:
– filled, painted, sanded (as delivered by a manufacturer)
– bare metal (after paint removal)
– plastic coated
The best results were obtained with the plastic coating, the worse was the filled, painted, and sanded surface.
The theory is as follows: there exists a separation bubble in the boundary layer. The size of this bubble determines the performance.
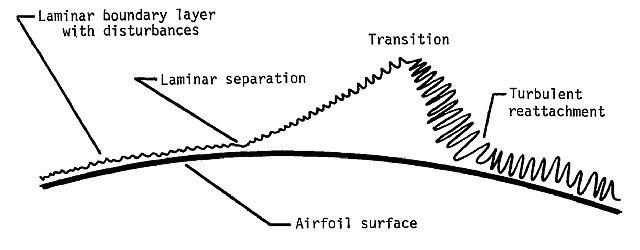
The flow can be vizualised using oil.
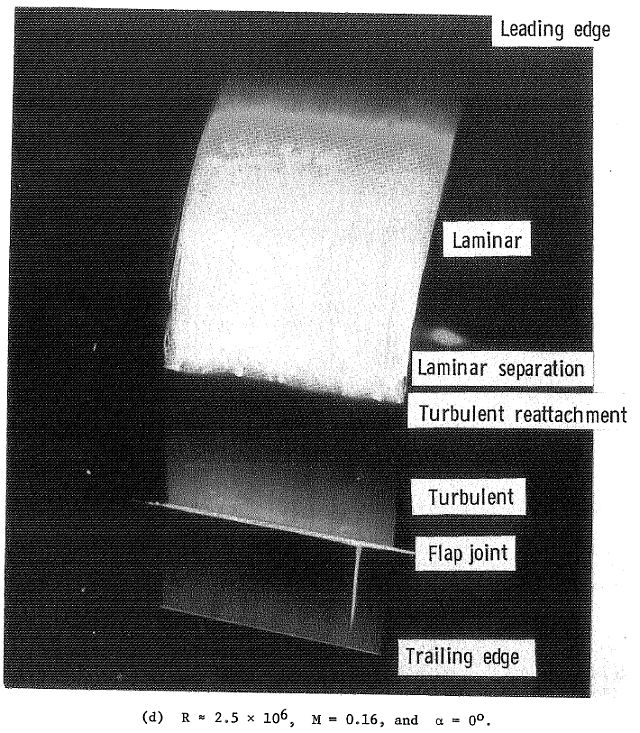
The differences between the various surfaces can be explained as follows: the bubble is largest on the smooth wing, small imperfections on the bare metal wing function as turbulators which improve the flow behaviour. The plastic foil then creates small waves which function even better. I have always been told that the glider wing must be smooth and geometrically accurate??? Not the case in this instance 😆 .
Walkalong glider
Other invaluable source of information is the patent database. Just recently I came accross a U.S. Patent 5100357 to MacCready for a walkalong glider.

I used to have one back in my F/F years for an indoor flying, I had no idea I could have been breaching someone’s rights. Perhaps this principle could be used also when competing with e-gliders. Just a suggestion – two fast runners holding a door panel above their heads … :lol:.
Jan
15.10.2010